Enunciado.
El programa que hay que presentar constará de un único fichero fuente de nombrebolos.c. La
correcta compilación de dicho programa, producirá un
fichero ejecutable, cuyo nombre será obligatoriamente
bolos. Respetad las mayúsculas/minúsculas
de los nombres, si las hubiere.
La ejecución del programa creará una serie de procesos que se transmitirán seńales entre ellos. En concreto, el árbol de procesos que hay que crear es el siguiente:

Para comprender mejor el funcionamiento de la práctica, cambiemos la posición de los procesos en el dibujo de manera que formen una figura semejante a la posición de partida de los bolos en una bolera
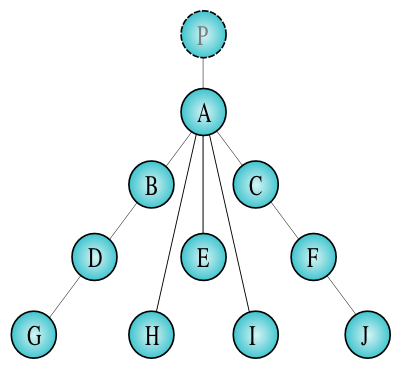
Una vez construido el arbol, el proceso padre muere y los demás permanecen vivos, bloqueados y sin consumir CPU. En este momento, habremos recuperado el control desde nuestra shell y enviaremos al proceso A una seńal
SIGTERM.
La seńal se va a ir transmitiendo a otros procesos
según el esquema que se indicará más abajo, volcando a su paso
otros bolos.
Transcurridos tres segundos, el proceso A comprobará cuántos procesos siguen vivos, imprimirá un dibujo con la situación por la pantalla, ejecutará una orden
ps -fu usuario que sirva de comprobación y
acabará, no dejando ningún proceso vivo.
En el siguiente dibujo, se observa cómo se propagan las seńales:
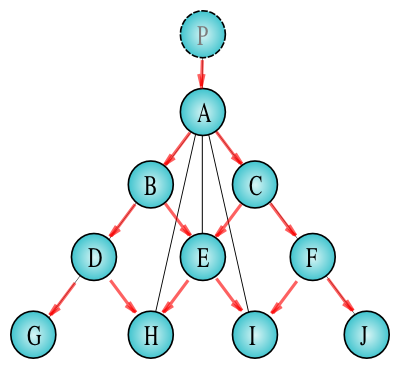
SIGTERM y no es
un proceso del final (no es ni G, ni H, ni
I, ni J) puede hacer una de estas cuatro cosas:
- No enviar la seńal a ningún proceso.
- Enviar la seńal al proceso situado debajo a la izquierda.
- Enviar la seńal al proceso situado debajo a la derecha.
- Enviar la seńal a ambos procesos.
gettimeofday.
Dividirá el valor entre cuatro y obtendrá el resto. Dependiendo
del valor del resto de la división (0, 1, 2 ó 3) se realizará la
acción correspondiente de la lista anterior.
Para que el proceso A sepa si siguen vivos los bolos E, H o I, podéis usar la llamada al sistema
waitpid en su versión no bloqueante.
Para saber qué ha ocurrido con
los procesos de la ristra B-D-G, se
procederá así:
- Si A no mandó la seńal a B, sabe que los tres están en pie.
- Si A mandó la seńal a B, hará un
waitbloqueante y B le dirá en su código de retorno cuántos bolos de la ristra B-D-G siguen en pie. Para que B sepa cuántos bolos quedan en pie se hace lo mismo, pero ahora el papel de A lo ocupa B y el de B lo ocupa D.
Ejemplo: en el caso de la ristra B-D-G, supongamos que A mató a B y B mató a D, pero D no mató a G. En ese caso, D devuelve a B un uno, indicando que hay un bolo en pie y B devuelve a A otro uno. A sabe que queda un bolo en pie de la ristra, por lo que tiene que ser G a la fuerza.
Los procesos, una vez creados, deben permanecer bloqueados, sin consumir CPU mientras esperan a recibir la seńal y enviarla a otros procesos, si procede.
Si se requiere sincronizar alguna acción, se pueden usar seńales, pero la espera se debe realizar sin consumo de CPU. Para simplificar el problema, podéis suponer que al ser mandada la seńal inicial manualmente, ya ha habido tiempo suficiente para que todos los procesos hayan sido creados para cuando el primer proceso la reciba. Sin embargo, esta concesión en aras de simplificación, no implica suponer ninguna condición, incluida ésta, en ninguna otra parte de la práctica.
Para ver si habéis conseguido crear el árbol de procesos correctamente, al menos en la primera fase, podéis descargaros el siguiente ejecutable: Arbol_dominO. No os va a funcionar en Linux, pues es un ejecutable binario y los procesadores son diferentes. Desde el servidor, para ver el árbol de procesos que habéis generado, usad la orden:
ps -f | grep "bolos$" | grep -v grep | sort |
Arbol_dominO Árbol con múltiples raíces. Se aborta.",
significa que habéis corrido varias veces vuestra práctica
sin matar los procesos de la anterior.
En el caso de Linux, podéis usar la opción -f de la
orden ps.
Restricciones
- Se deberán usar llamadas al sistema siempre que sea posible, a no ser que se especifique lo contrario.
- No está permitido usar la función de biblioteca
system, salvo indicación explícita en el enunciado de la práctica. - Se ha de lograr que al hacer un
psaparezca por la pantalla en lugar debolos, el nombre de cada proceso: A, B, C, etc. - No se puede suponer que los PIDs de los procesos de una ristra van a aparecer consecutivos. Puestos en plan exquisito, ni siquiera podemos suponer que estarán ordenados de menor a mayor (puede ocurrir que se agoten los PIDs y retome la cuenta partiendo de cero).
- No está permitido el uso de ficheros, tuberías u otro mecanismo externo para transmitir información entre los procesos.
Plazo de presentación.
Hasta el viernes, 23 de marzo de 2007, inclusive.Normas de presentación.
Acá están.LPEs.
- Las tareas que tiene que realizar el
programa son variadas. Os recomiendo que vayáis
programándolas y comprobándolas una a una. No es muy
productivo hacer todo el programa de seguido y corregir
los errores al final. El esquema que os recomiendo
seguir para facilitaros la labor se os muestra a
continuación:
- Haced un pequeńo programa que cree los procesos
P y A. Compiladlo, ejecutadlo,
comprobadlo con
Arbol_dominOy depuradlo, si fuera necesario. - Lograd que P muera y A se quede solo.
- Cread ahora los procesos B, H, E, I y C. Alternativamente, podéis intentar generar los procesos mediante un bucle, sin hacerlo en el código explícitamente.
- Acabad generando las dos ristras B-D-G y C-F-J, por el mismo procecimiento.
- Una vez el árbol esté bien generado, comprobad
que los procesos no consumen CPU con
top. - Se debe lograr que los procesos recién creados
cambien el nombre que aparece al hacer
ps. Para ello, un buen truco consiste en que ejecuten unexecque conduzca a su propio programa otra vez pero en el que hacemos queargv[0]pase a ser el nombre deseado. Al entrar por elmain, miramos el valor deargv[0]y sabemos que si valeboloses la entrada inicial y si valeAes la segunda entrada del proceso A y lo podemos dirigir a una función propia. - Ahora debéis conseguir que A no se muera cuando
le mandéis la seńan
SIGTERMsino que imprima algo por la pantalla, por ejemplo. - Llegamos a la parte más difícil. Para empezar,
debemos hacer que los procesos propaguen la
seńal
SIGTERM. Es mejor que al principio la propagen a los dos que tienen debajo siempre. Es probable que os encontréis con problemas para que un proceso consiga los PIDs de los procesos que tiene que matar. Os recomiendo que antes de matar, impriman lo que van a hacer y el PID de quien van a matar por la pantalla. Es probable que llegados a este punto tengáis que cambiar el orden en que se crean los procesos... - Una vez todos matan a los que tienen que matar,
introducid la condición del
gettimeofday. - Haced que A espere tres segundos. Podéis usar
la función de biblioteca
sleep. A continuación que mire si E, H e I siguen vivos y lo ponga por la pantalla. - Nos ocupamos ahora de la ristra B-D-G. Si A mató a B, que haga un wait y pida el código de retorno. Si B mató a D que coja su código de retorno y se lo trasmita a A. Si no, devuelve a A un 2. Si D mató a G, hace un wait y devuelve a B un cero. Si no es así, devuelve un uno. A imprime con esta información cuántos están vivos.
- Hacer lo mismo con la ristra C-F-J.
- Borrad la información de depuración y que A imprima de forma bonita qué bolos quedan vivos.
- A finaliza ejecutando el ps para que podamos comprobar que todo está bien.
- Haced un pequeńo programa que cree los procesos
P y A. Compiladlo, ejecutadlo,
comprobadlo con
- No se puede usar
sleep()o similares para sincronizar los procesos. Hay que usar otros mecanismos. - Sabéis que si usáis espera ocupada en lugares donde explícitamente no se haya dicho que se puede usar, la práctica está suspensa. No obstante, existe existe una variedad de espera ocupada que podríamos denominar espera semiocupada. Consiste en introducir una espera de algún segundo en cada iteración del bucle de espera ocupada. Con esto el proceso no consume tanta CPU como en la espera ocupada, pero persisten los demás problemas de la técnica del sondeo, en particular el relativo a la elección del periodo de espera. Aunque la práctica no estará suspensa si hacéis espera semiocupada, se penalizará en la nota bastante si la usáis. En conveniente que la evitéis.
- Evitad, en lo posible, el uso de variables globales. Tenéis la posibilidad de declarar variables estáticas.
- Tened cuidado con el uso de
pause(). Salvo en bucles infinitos depauses, su uso puede estar mal. Mirad la solución a la práctica propuesta en la sesión quinta acerca de él o el siguiente LPE. - Es conveniente que, antes de entregar la práctica,
comprobéis que los
kills están enviando la seńal a los procesos correctos. Si al imprimirlo resulta que a veces mandan la seńal al proceso "0", es que está mal. Lo que ocurre es que el proceso que realiza elkillrecibe la seńal y salta a la manejadora antes de actualizar la variable que contiene el pid de su hijo. Por eso la variable tiene 0. La solución consiste en que el patriarca bloquee la seńal y cada proceso la desbloquee justo antes de quedarse parado y después de haber hecho todas sus tareas. - El programa que he hecho se para a veces.
O en mi casa se para, pero en clase, no.
O en clase sí, pero en casa, no.
Solución. - żQué hago cuando mi programa se desboca
para no perjudicar el funcionamiento de la
máquina?
Solución. - Habréis observado, como no puede ser de otro modo,
que al ejecutar un
execlas variables de un proceso se borran. Es natural pues el proceso vuelve a cargar el programa y comienza de cero con la funciónmain. Así es muy difícil pasar un pid a otro proceso que lo necesite. Una solución es usar argumentos adicionales en la llamada aexecde modo que se reciba la información enargv[1],argv[2], ... - Para resolver el problema de que el proceso A tiene,
al final, que ejecutar un
psy matar a todos los procesos, podéis hacer que A tenga un hijo que ejecute elpsal hacer unexec. El proceso A esperará a que el hijo acabe con unwaity matará a todos los procesos que queden vivos. - Para que A al final pueda matar a todos los procesos
que queden vivos, podéis intentarlo mandando una
seńal
SIGINTen un kill desde A, indicando como PID un 0. Comentadme si es efectivo. - Es evidente que si A tiene que hacer un
pso mandar hacerlo, va a aparecer en la lista como vivo, aunque represente a un bolo muerto. No os preocupéis por este detalle. Solucionarlo complicaría la práctica innecesariamente.
Prácticas propuestas en ańos anteriores.
- Curso 1999-2000: Caín y Abel
- Curso 2000-2001: Recuento tétrico
- Curso 2001-2002: La ristra diabólica
- Curso 2002-2003: The ring (la seńal)
- Curso 2003-2004: The Lord of the Rings
- Curso 2004-2005: El efecto dominó
- Curso 2005-2006: Infinito